A*算法浅谈
前置芝士:堆优化Dijkstra/优先队列bfs(其实本质上相同)
简介
A*算法是一种常见的搜索算法,可以用于在搜索中更快找到并判定最优解。
概念
最短路问题,大家应该都会解吧。堆优化dij其实就是优先队列bfs。
但是,优先队列bfs的策略有一个缺点:当前代价最小的状态,接下来可能有很大的代价。这就导致了最优解可能反而出现的比较晚。
于是我们很自然地想到一个对策:定义一个估价函数,表示状态到最终状态的代价的估计值,而每次从堆中取出并扩展的是**“当前代价+估值”最小**的状态。并且,每个状态第一次出队,就是初始状态到它的最优解。
而这个估价函数有一个很重要的性质:假设为状态到最终状态的实际值,则:
为什么呢?我们举个例子看看:(是边权)
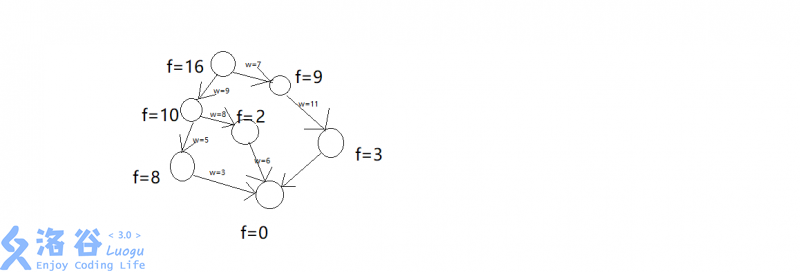
显然,最短路应该是走最左边这条,代价为,但是由于这条边上的估值都被过大的估计导致结果算错(算出来是)
而如果保证,则即使某非最优解搜索路径上的状态,由于估值不够准确,先被扩展了,但是:
- 由于并非最优,故随着当前代价不断累加,总有一时刻s的当前代价大于从初始状态到目标状态的最小代价。
- 在最优解搜索路径上的状态,由于,故的当前代价加上小于等于从初始状态到目标状态的最小代价。
综上所述,将会被取出并扩展,并得到最优解。(在本文中请区分“扩展”与“被扩展”)
而且我们可以想到,f(x)越接近g(x),就能越快找到最优解。
这种带估值函数的优先队列bfs,就是A*。
接下来我们通过几个例子,讲一讲A*估值函数的设计。
估值函数
先看一道例题:
题意:求号点到号点的次短路长度。
我们已经说过,每个状态第一次出队,就是初始状态到它的最小代价。事实上,每个状态第次出队,就是初始状态到它的第小代价。(由数学归纳法)
并且每个状态的第小代价,必是由某一个出队次的状态扩展得到的。
证明:
由于每个状态第次出队,就是初始状态到它的第小代价,故对于一个已出队次的状态,由于另一个最小的被出队次并能扩展到的状态扩展到的当前代价,必然比任意一出队次的状态扩展到的当前代价低(该代价必然比出队次的扩展到的当前代价大),又比任意一出队次的状态扩展到的代价要大,故当前代价就是初始状态到的第小代价,是由出队次的扩展得到的。
综上所述,就是初始状态到每个状态的第小代价,是由一个出队次的状态扩展得到的。
故控制每个节点出队不超过次,号节点第次出队时的代价就是次短路。
一个注意点:每个节点最多扩展一次,入队一次,出队两次。
那么现在我们需要设计一个估值函数。
然后发现,直接令为到的最短路即可。
#include <bits/stdc++.h>
using namespace std;
typedef double db;
db x[205],y[205],f[205];
int vis[205];
struct dat
{
int u;
db w;
bool operator < (const dat &rhs) const {
return w>rhs.w;
}
};
struct ndat //注意:不仅要存储每个节点的当前代价+f(x),还要存储该搜索路径上的每个节点的访问情况。每个节点最多访问一次!
{
int u;
db w;
int vis[205];
ndat (int u,db w):u(u),w(w) {
memset(vis,0,sizeof(vis));
}
bool operator < (const ndat &rhs) const {
return w>rhs.w;
}
};
inline double a(int i,int j)
{
return sqrt(pow(x[i]-x[j],2)+pow(y[i]-y[j],2));
}
vector<int> G[205];
void addedge(int i,int j)
{
G[i].push_back(j);
G[j].push_back(i);
}
int main()
{
int n,m,tot=0;
db ans=-1;
cin>>n>>m;
for (int i=1;i<=n;i++) cin>>x[i]>>y[i];
for (int i=1;i<=m;i++)
{
int u,v;
cin>>u>>v;
addedge(u,v);
}
memset(f,127,sizeof(f));
f[n]=0;
priority_queue<dat> Q;
priority_queue<ndat> q;
Q.push((dat){n,0});
while (!Q.empty()) //先预处理处每个节点的f(x)
{
dat p=Q.top();Q.pop();
int u=p.u;
if (vis[u]) continue;
vis[u]=1;
for (int i=0;i<G[u].size();i++)
{
int v=G[u][i];
if (f[u]+a(u,v)<f[v])
{
Q.push((dat){v,f[u]+a(u,v)});
f[v]=f[u]+a(u,v);
}
}
}
q.push((ndat){1,f[1]});
while (!q.empty())
{
ndat p=q.top();q.pop();
int u=p.u;
db w=p.w-f[u];
if (u==n) ++tot;
if (tot==2)
{
ans=w;
break;
}
for (int i=0;i<G[u].size();i++)
{
int v=G[u][i];
if (p.vis[v]) continue; //如果当前搜索路径上访问过该点,则不必再次访问
ndat nv=p;
nv.u=v;
nv.w=w+a(u,v)+f[v];
nv.vis[v]=1;
q.push(nv);
}
}
(ans<0)?printf("%d\n",-1):printf("%.2f",ans);
return 0;
}
利用这个思路,我们还可以解决短路问题
对于题目中的“总能量”条件,其实和总数量(即)是一样的。转化一下即可。
(顺便说一句,这题不知道怎么回事恶意卡A*,非要用左偏树可并堆来做。在我看来这是一种无聊而可恶的行径,没有什么教育意义。前面的都是屁话,最重要的是,不让我们多A一道题)
这道题并不需要控制每个状态访问的次数。
// luogu-judger-enable-o2
#include <bits/stdc++.h>
using namespace std;
typedef double db;
db dis[5005],f[5005];
int t[5005],vis[5005];
struct dat
{
int u;
db w;
bool operator < (const dat &rhs) const {
return w>rhs.w;
}
};
vector<dat> G[5005],g[5005];
void addedge(int i,int j,db w)
{
G[i].push_back((dat){j,w});
g[j].push_back((dat){i,w});
}
int main()
{
int n,m,ans=0;
db e;
cin>>n>>m>>e;
if (e>1000000)
{
cout<<"2002000"<<endl;
return 0;
}
for (int i=1;i<=m;i++)
{
int u,v;
db w;
cin>>u>>v>>w;
addedge(u,v,w);
}
memset(f,127,sizeof(f));
f[n]=0;
priority_queue<dat> q,Q;
Q.push((dat){n,0});
while (!Q.empty())
{
dat p=Q.top();Q.pop();
int u=p.u;
if (vis[u]) continue;
vis[u]=1;
for (int i=0;i<g[u].size();i++)
{
dat v=g[u][i];
if (f[u]+v.w<f[v.u])
{
Q.push((dat){v.u,f[u]+v.w});
f[v.u]=f[u]+v.w;
}
}
}
q.push((dat){1,f[1]});
while (!q.empty())
{
dat p=q.top();q.pop();
int u=p.u;
db w=p.w-f[u];
if (u==n)
{
e-=w;
if (e>=1e-6) ans++;
else break;
continue;
}
for (int i=0;i<G[u].size();i++)
{
dat v=G[u][i];
q.push((dat){v.u,w+v.w+f[v.u]});
}
}
cout<<ans<<endl;
return 0;
}
A*的另一个应用就是8数码问题
我们发现,无论是多么好的策略,从一个状态到目标状态的代价,都不会低于该状态中每个数不为的数到目标状态中的的曼哈顿距离之和。故我们可以把估价函数设为这个和。即:
并且,不同于短路问题,每个状态最多扩展一次。即一个状态第二次被取出,就可以直接把它扔掉了。(这其实是正常A*的套路。)
如何判定一个状态是否扩展过呢?这里直接使用进行判定。不过,有一种叫康托展开的方法可以把1~9的全排列映射成1~362880的正整数(0~8当然也行),请自行翻题解百度。
代码:
#include <bits/stdc++.h>
#define in inline
using namespace std;
// lyd /-\|<|O|
const int end=123804765;
map<int,int> vis;
int d[4]={-3,-1,1,3};//四个方向
int pow10[]={
1,10,100,1000,10000,100000,1000000,10000000,100000000
};
in int get(int x,int p) //获取x的右数第p为
{
return int(x/pow10[p-1])%10;
}
in int isup(int x) //判断是否在边缘
{
return x<=3;
}
in int isdown(int x)
{
return x>=7;
}
in int isleft(int x)
{
return x%3==1;
}
in int isright(int x)
{
return x%3==0;
}
in int swap(int x,int a,int b)
{
int s=get(x,a),t=get(x,b);
x-=s*pow10[a-1]+t*pow10[b-1];
x+=s*pow10[b-1]+t*pow10[a-1];
return x;
}
in int row(int x)
{
return (x-1)/3;
}
in int col(int x)
{
return (x-1)%3;
}
in int f(int state) //估值函数
{
int s[20],t[20];
memset(s,0,sizeof(s)),memset(t,0,sizeof(t));
int ans=0;
for (int i=1;i<=9;i++) s[get(state,i)]=i,t[get(end,i)]=i;
for (int i=1;i<=9;i++) ans+=abs(row(s[i])-row(t[i]))+abs(col(s[i])-col(t[i]));
return ans;
}
struct data
{
int s,w;
data () {}
data (int s,int w):s(s),w(w+f(s)) {}
bool operator < (const data &rhs) const
{
return w>rhs.w;
}
};
priority_queue<data> q;
int main()
{
int s;
cin>>s;
q.push(data(s,0));
vis.clear();
while (!q.empty())
{
int p;
data u=q.top();q.pop();
if (vis[u.s]) continue;
if (u.s==end)
{
cout<<u.w<<endl;
return 0;
}
vis[u.s]=1;
for (int i=1;i<=9;i++)
{
int x=get(u.s,i);
if (!x)
{
p=i;
break;
}
}
for (int i=0;i<4;i++)
{
if (i==0 && isup(p)) continue;
if (i==1 && isleft(p)) continue;
if (i==2 && isright(p)) continue;
if (i==3 && isdown(p)) continue;//判断位置是否合法
int pp=p+d[i];
int t=swap(u.s,p,pp);
q.push(data(t,u.w-f(u.s)+1));
}
}
}
结语
A*算法是启发式搜索的一种。事实上除了A*算法外还有IDA*(迭代加深启发式搜索)。在考场上,如果有扎实的搜索功底,是可以拿到很多分的。(毕竟,像最短路算法,dp等,都和搜索有关系。)